Projects
Things I've built
Robots, oscilloscopes, EVs, assistive devices, LED lights from recycled materials. If it has circuits, I've probably tried building it.

2016
SnapBot — Modular Robotics
Snap-fit magnetic assembly robotics platform for education. Top 20 at IndiaHacks 2016.
⚙
2015
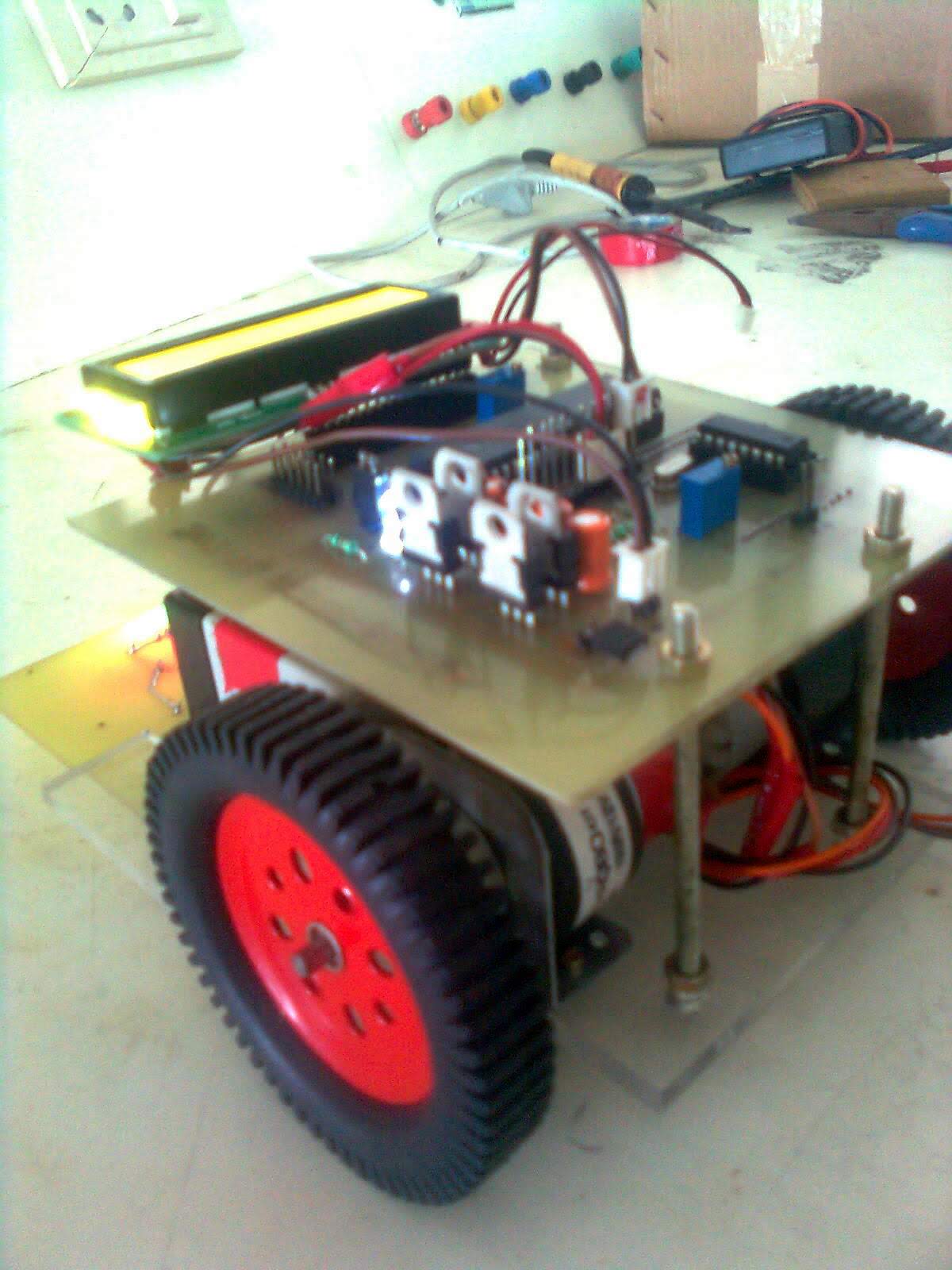
CardBot — VR Robot
4-wheeled robot controlled via Google Cardboard VR headset. Runner-up at Hack India 2015.
2015
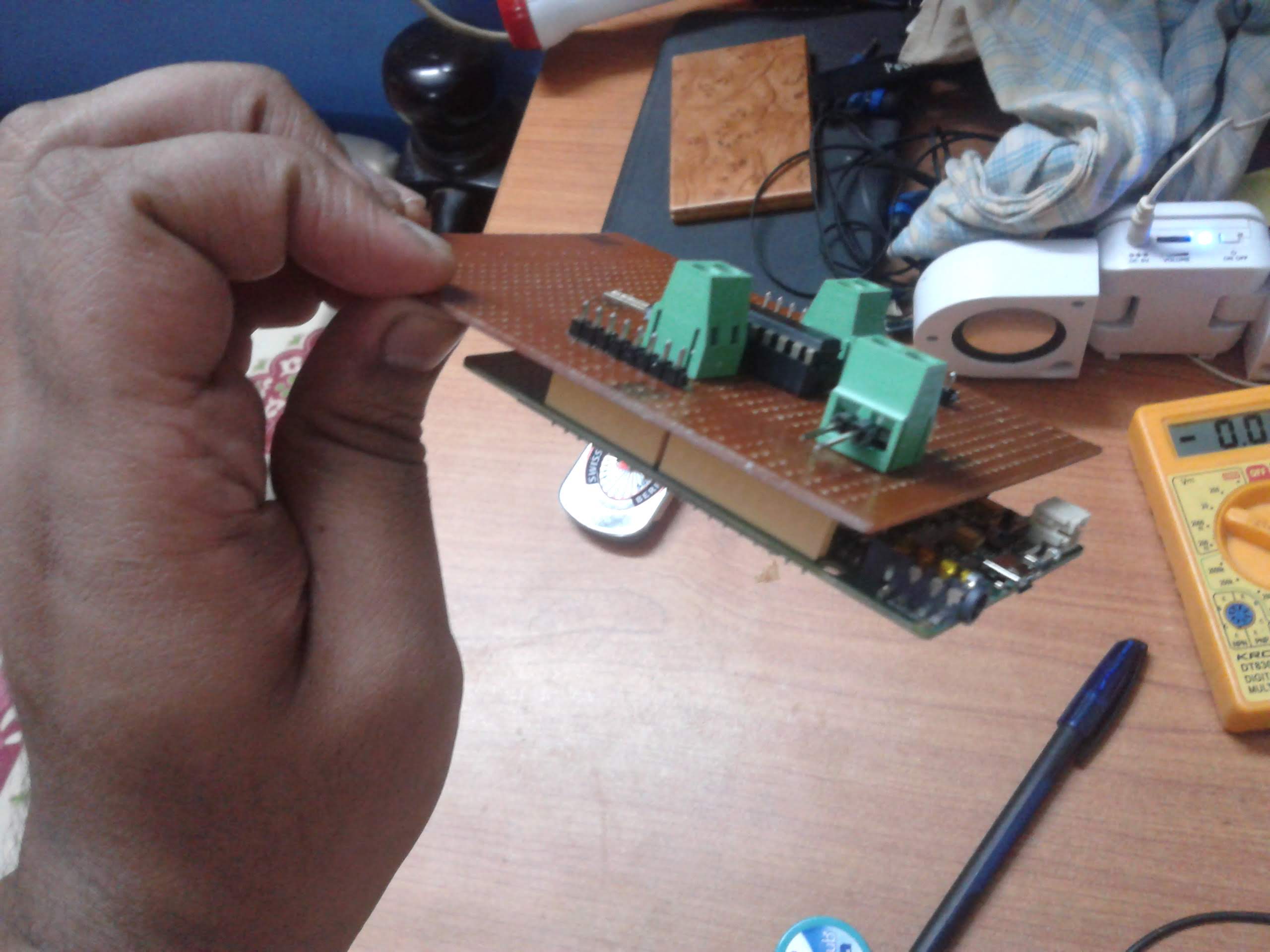
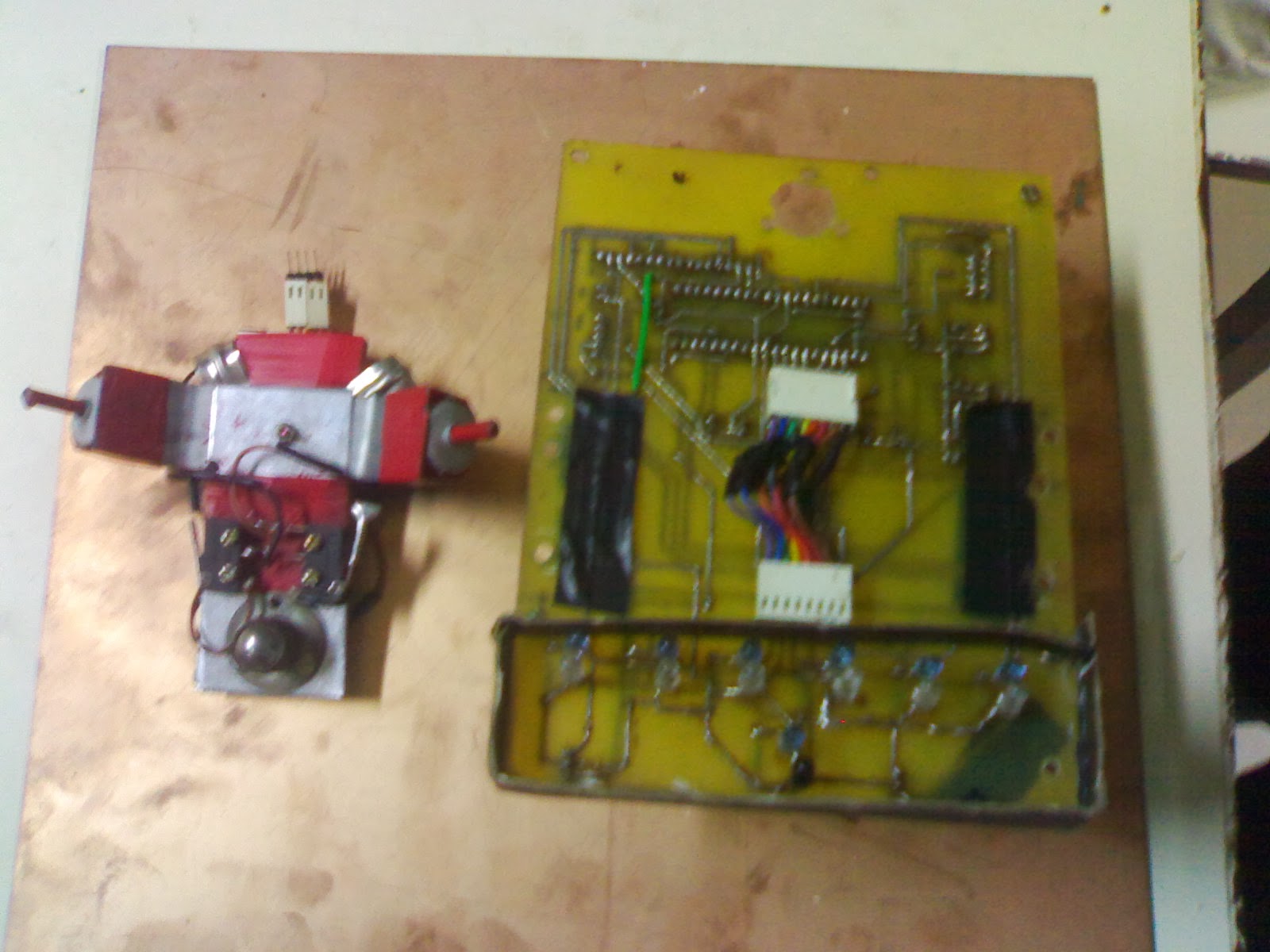
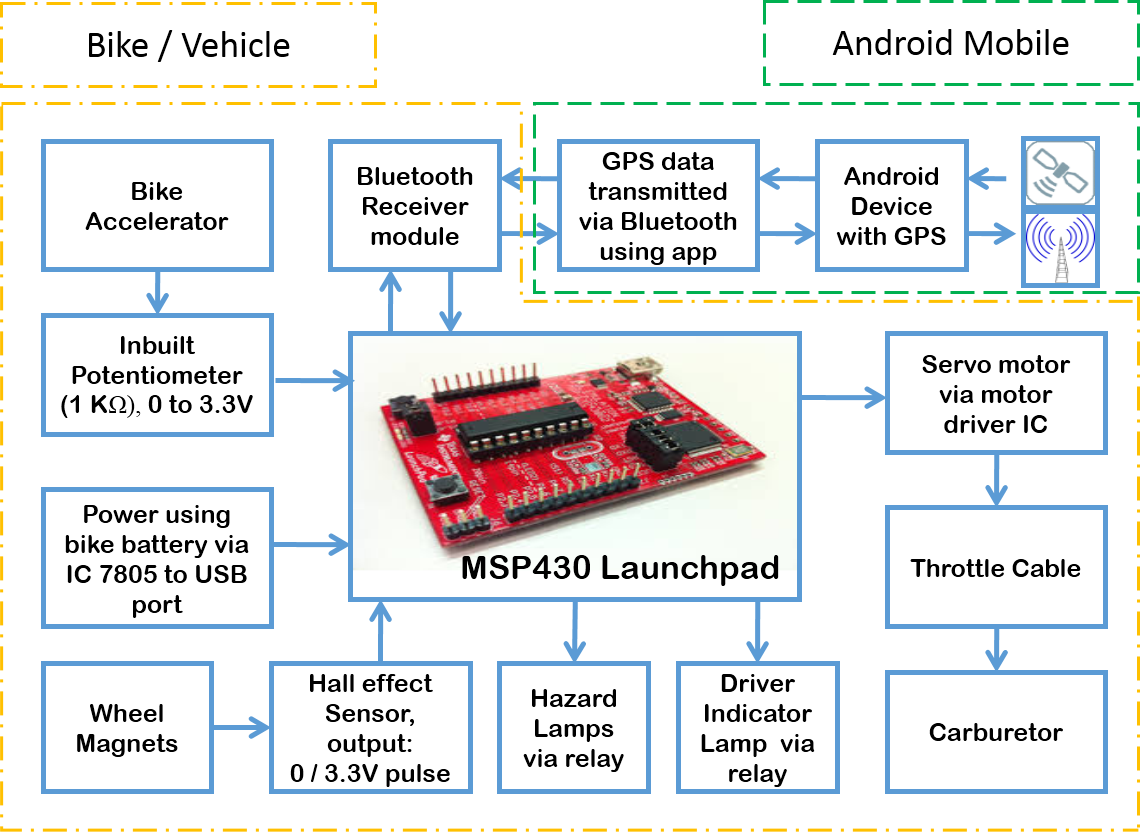
Automated Speed Management
GPS-assisted vehicle speed control. Arduino overrides throttle in speed-restricted zones. Tested on Honda Activa.
♥
2014
Ultravision for the Blind
Wearable assistive device helping visually impaired children navigate indoor and outdoor environments.

2013
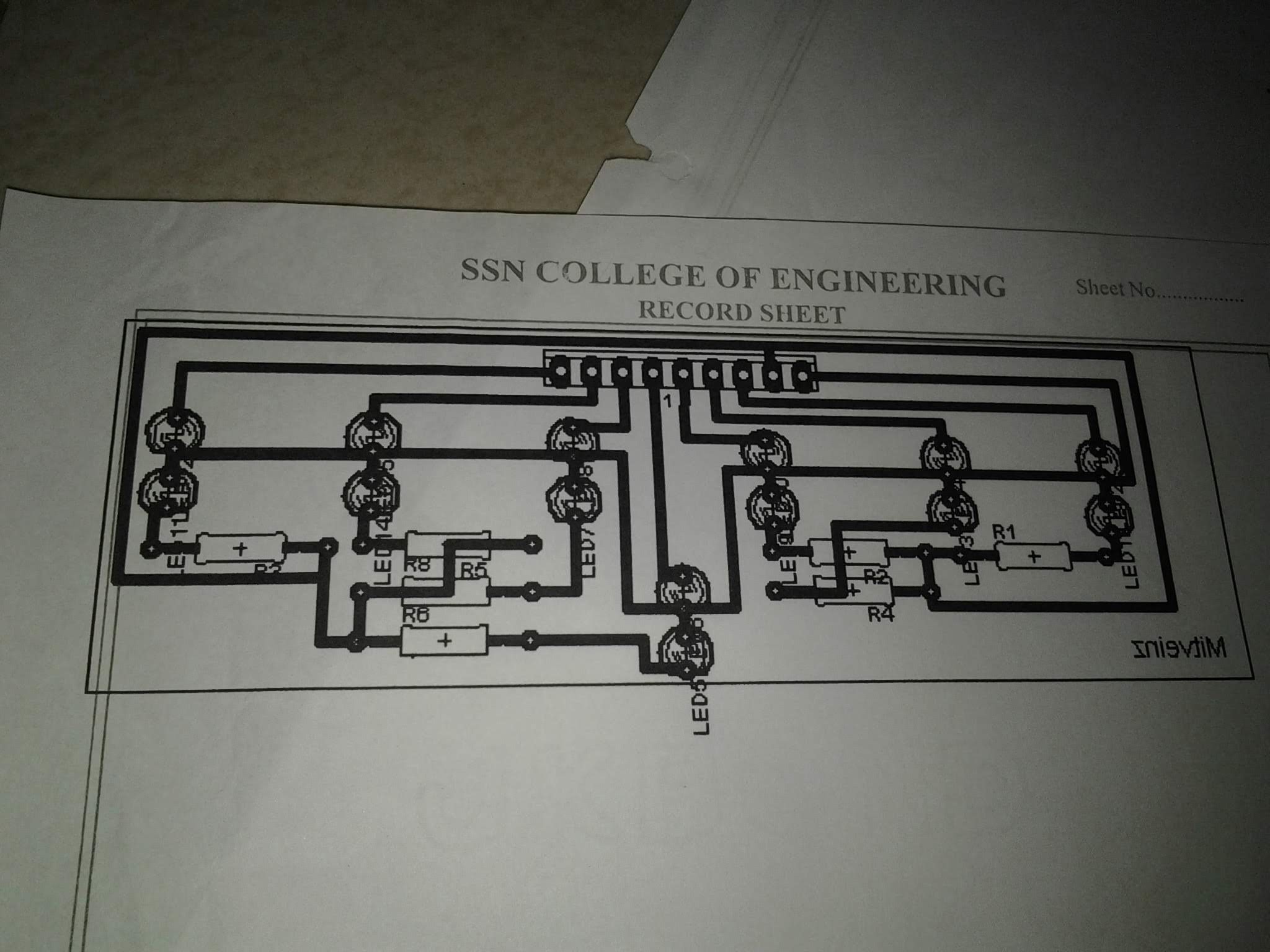
PringLed — Recycled LED Light
DIY LED lighting from recycled materials. Working for 5+ years. Featured on Hackster.io.
2013
Chiposcope — DIY Oscilloscope
Oscilloscope on Chipkit Uno32 with OLED display. Featured on Digilent Blog, Instructables, Hackster.io.
2013
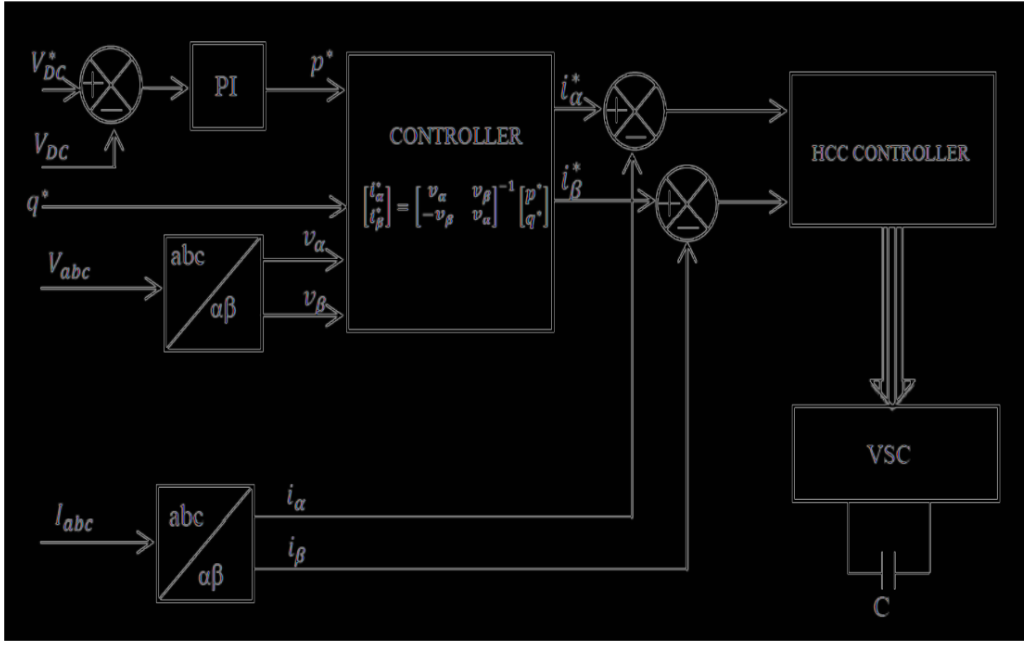
DSTATCOM — Journal Publication
Power factor correction using Distribution Static Synchronous Compensator. Published in ARPN Journal. FPGA implementation.

2011
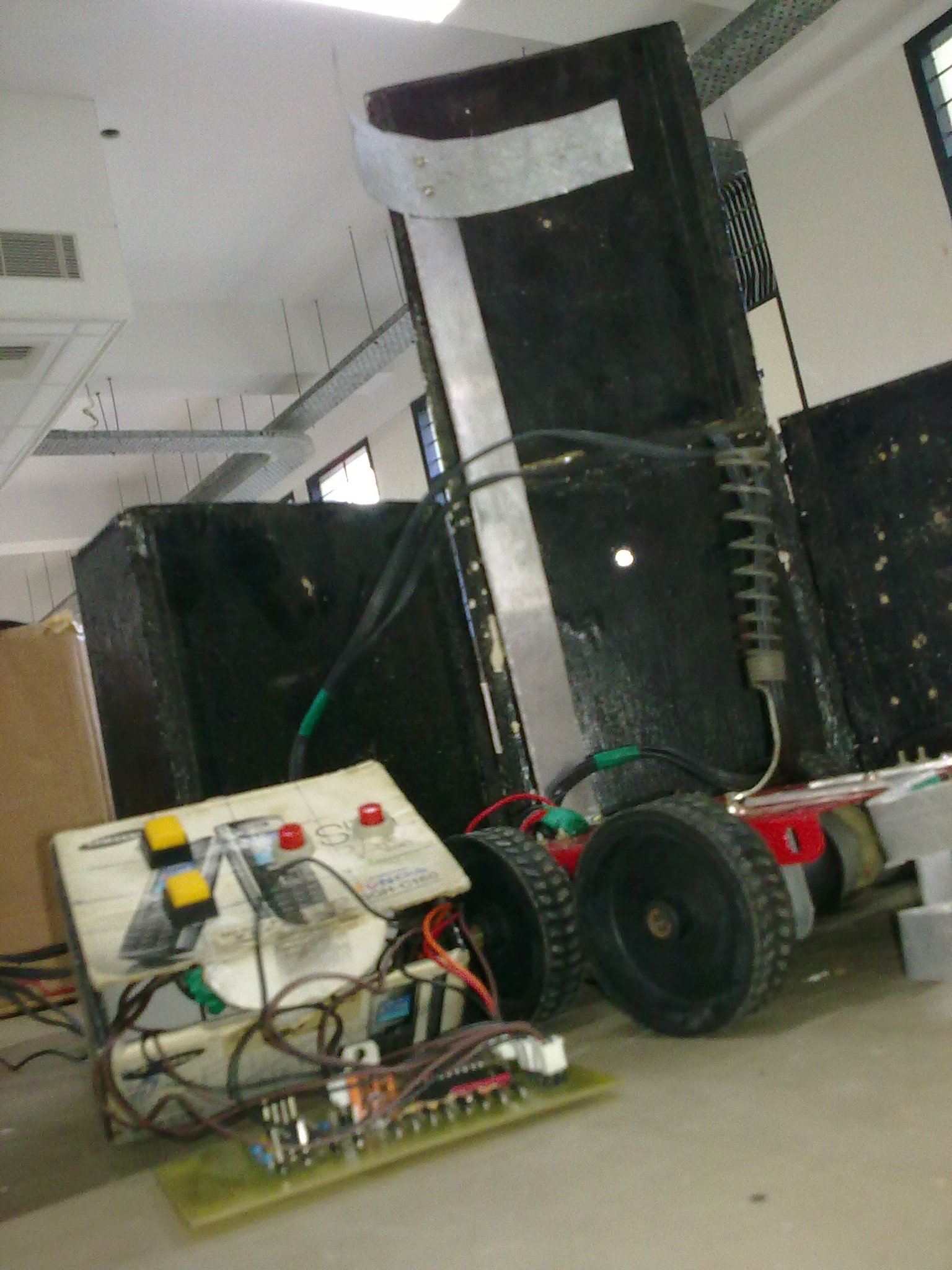
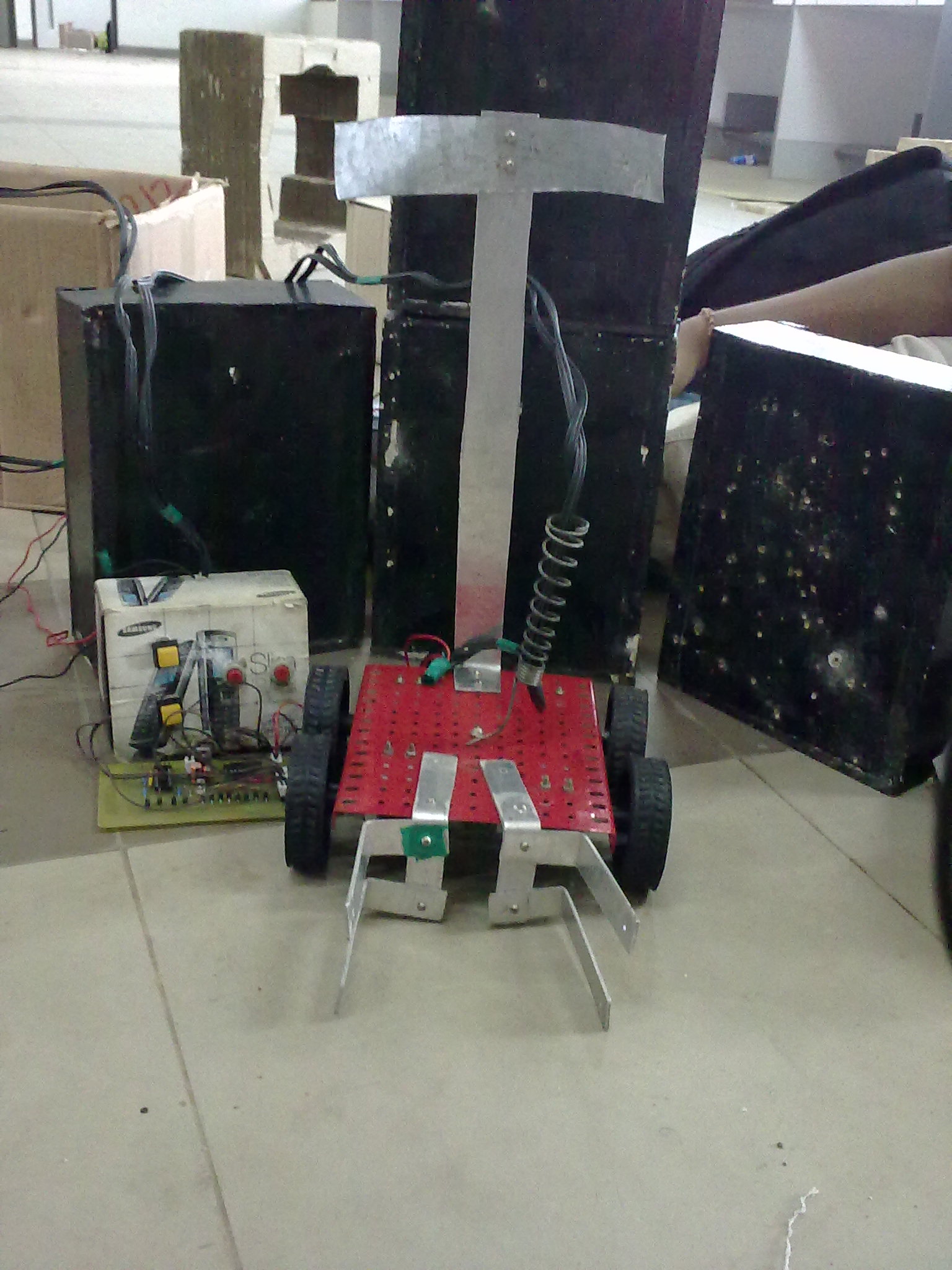
Shaastra — IIT Madras
3rd place at national robotics competition. Built autonomous and manual robots from scratch. 40+ competing teams.
2011
Electronics Ventures
Wheeled robots, wall-climbing robots, magnetic levitation, solar power, wind energy, wireless charging, and more.
2010
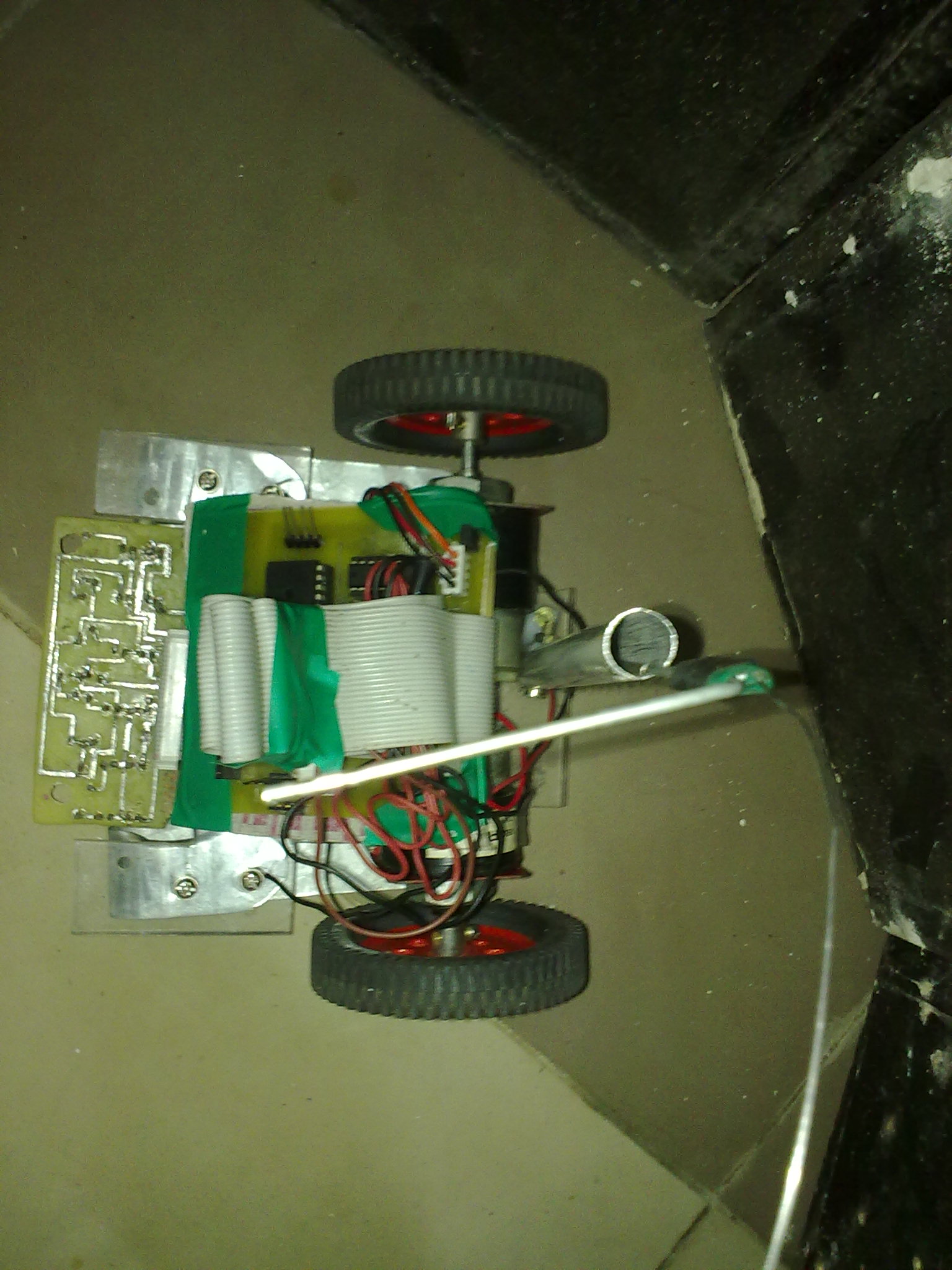
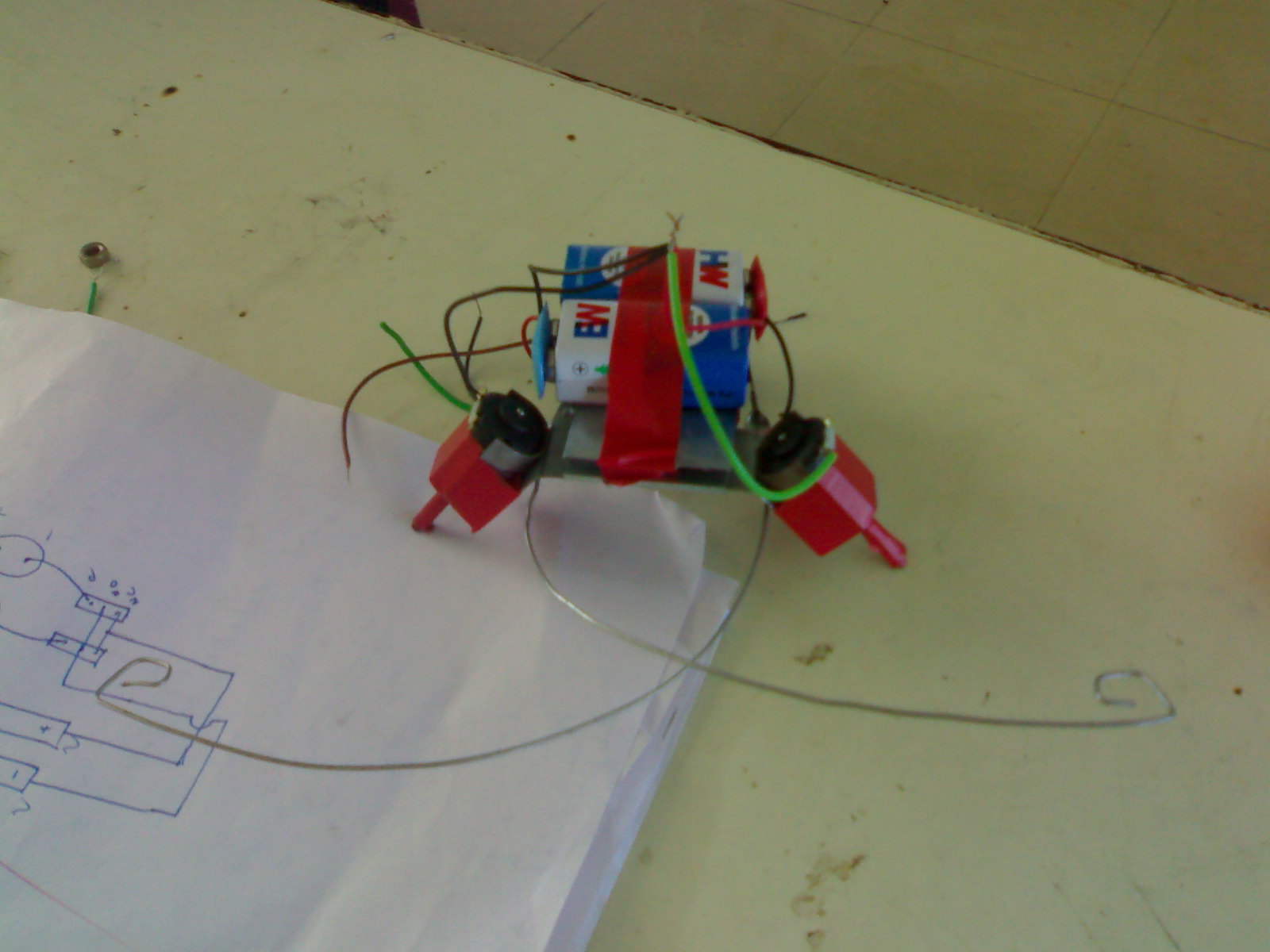
Cockroach Robot
My first robot. Simple obstacle avoidance with the most basic control system. Where it all started.